Article
Tangible 3D Urban Simulation Table
BY Flora Salim
THEME LEADER Paul Loh
SUPPORTED BY University of Melbourne, as part of the NGV Triennial – exploring the emerging intersections of art, design, science and society.
Flora Salim researches human mobility and behaviour analytics, using context and activity recognition, and urban intelligence. For Triennial Voices Flora Salim shares a video presenting the Tangible 3D Urban Simulation Table– a model to illustrate how the urban landscape could integrate design alternatives created via volatile environmental phenomena, human movements and social interactions in the city.
Abstract
Design models for an urban landscape could simulate how design alternatives perform with regards to volatile environmental phenomena, human movements and social interactions in the city. This paper presents a low-tech markerless approach to designing and developing a tangible 3D urban simulation table, using an ordinary table, generic building blocks and fabricated urban models, a Kinect and a projector. The digital 2D scene was projected on the table, in response to the forms and configurations of physical 3D models on the table. The installation that was developed for a public exhibition was specifically designed for visualizing wind flows and speed on an urban site. Users can get their hands on the 3D tangible building blocks to change the configuration of the urban model on the table and get a sense how it influences the wind flow around the site.
1. INTRODUCTION
Consider this scenario. In a dimly lit room, a team is gathered around a table, where on it sits a collection of 3D building models of different height and volume that represent a topographic representation of an actual urban precinct. As the tangible building blocks are arranged into different configurations, patterns of wind flow emerge across the table. The wind simulation that runs on the site is projected on the table, with variable wind direction and velocity visualized as flow of particles with various density and speed around the buildings. The team could use the 3D building blocks to explore the effect of any given building design on the site in regard to local wind conditions. Through careful manipulations performed on the set of blocks, users could find urban volumetric configurations that could potentially divert, slow down or cancel the wind in the area (Figure 1).
Different design options for new developments on a vacant land parcel in a particular urban precinct can be explored on the table. Architects and engineers could rotate the 3D tower model to see if the curved facing façade of the tower or the flat facing work best against the prevailing wind and discover the most optimal orientation and form of the new tower that can minimize local turbulence or reduce high wind pressure on pedestrianized areas around the building. Similarly, the same exercise can also be applied to discover where to best place a new bus shelter, transit hub, or a natural or artificial windbreak in an existing urban site or pedestrian areas that are inflicted with strong winds, and discover the forms and typology that would work best for the context of the site.
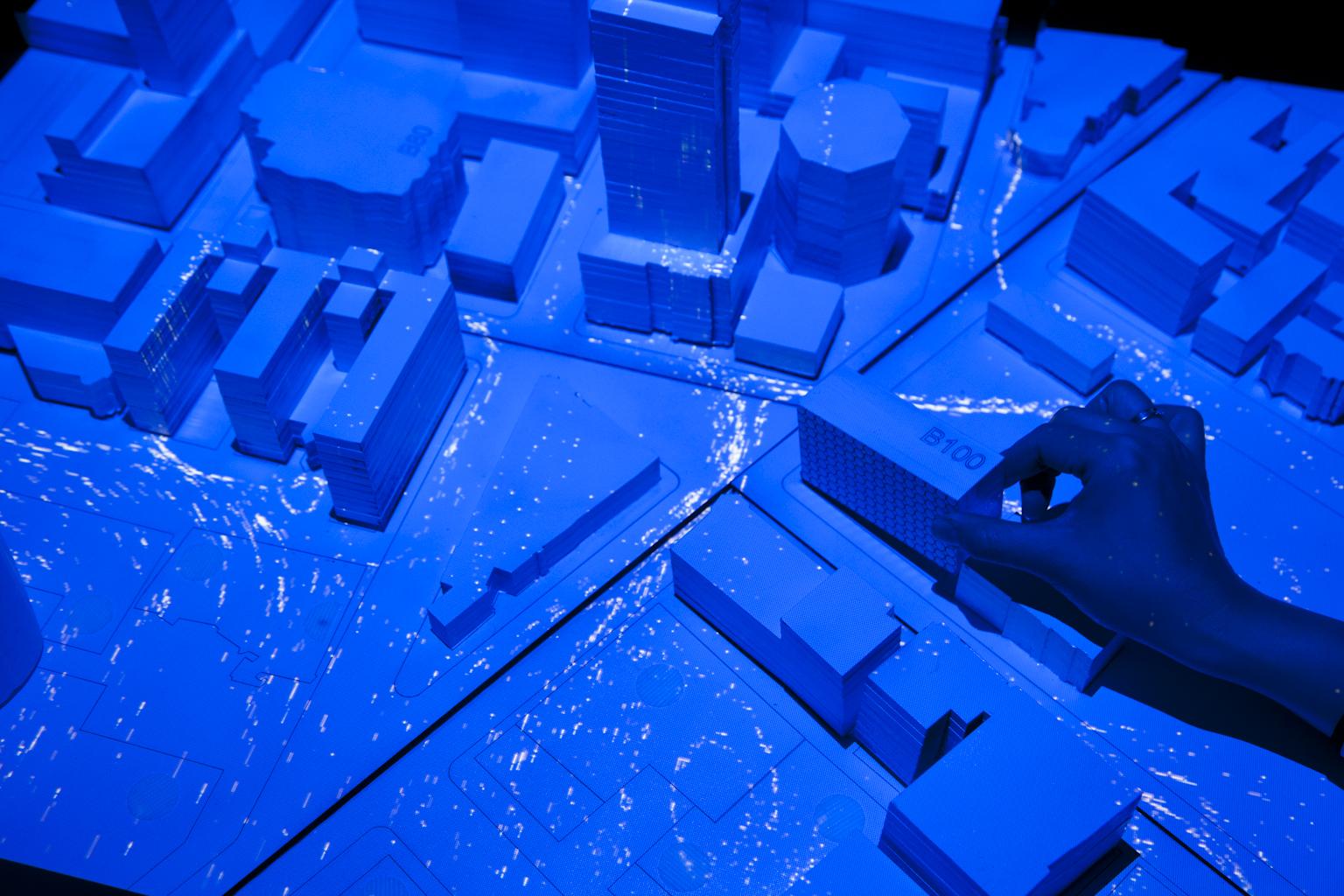
Figure 1. The low-tech tangible 3D urban wind simulation table.
Those are the example scenarios that can be explored in the tangible urban simulation table presented in this paper. The projected feedback of the contextual and real-time analysis of the geometry, size, and orientation of a group of 3D urban models on the table allow the visual testing of “what-if” urban scenarios against real time and historical urban context in preliminary design exercises. Using 3D scanning and spatial projection, real-time data analysis, and physics simulation, the tangible urban simulation table presented in this paper demonstrates a powerful new approach for designing and interacting with flexible and modular 3D physical building blocks, environmental, and urban data for collaborative architectural and urban landscape design in the early design stage.
We consider this as a low-tech prototype, as the installation uses an ordinary table surface to place the three- dimensional building models and combines low cost 3D depth-sensing camera (Kinect) and spatial projection of a real-time fluid simulation on the surface. Although it is a low-tech set up, the visualization content enables it to look like as a hi-tech tool with its intuitive visual design and instantaneous feedback to changes on the table. Any 3D models or arbitrary objects can be used as an input on the table. The installation itself is essentially an interactive digital wind tunnel with physical building blocks as input devices for collaborative design and planning exercises.
2. RELATED WORK
Tangible user interfaces emerged as tabletops in the 1990s as a media for social computing. Urp, a tag-based Luminous Table for urban planning (Underkoffler and Ishii 1999), was developed for designers and urban planners to gather around a simulated view of the entire urban planning stage and manipulate the positions and orientations of the building blocks on the table. There are two major limitations of the Urp table. First, Urp used static objects and trackers, or building blocks that have a fixed geometry and cannot be flexibly modeled in real-time. The architectural models in Urp used predetermined forms. The system relies on attaching visualised information to pre- existing models and must correspond at least in its dimensions to the simulation that will be overlaid on it (Underkoffler and Ishii 1999),. This renders a system like Urp not applicable for form-finding exercises in the early stage design of new architectural design and urban development projects. Second, the wind simulation in Urp is projected at a modest eight Hertz (Underkoffler and Ishii 1999), and only takes a limited number of objects as input to the airflow simulation.
Another tangible tabletop for urban planning is ColorTable (Maquil et al. 2008), an interactive design tool based on color blocks and barcodes, representing different design elements that the user can move and organize to test different ideas in a collaborative context. The strength of the system was in its capabilities of creating a global database with different design components. However, ColorTable did not have an associated analysis process that supports architectural decision making in all stages. Users of the ColorTable tested different ideas using 2D maps,plans, and cards that represented symbolic building blocks and infrastructures. There is no facility for 3D inputs that support the creation of flexible architectural or urban landscape models. The ColorTable was set up in the MR- Tent (Wagner et al. 2009), a mixed reality environment for community participation in creating a vision for an urban project. This project was set up as a visualization and navigation tool for probing the stakeholders of a city or a potential urban project to discuss urban planning issues, mainly revolving the development or placement of specific infrastructure and services on site. However, such a tool, which finds usefulness in urban planning, is not applicable for architectural and urban landscape design since it did not cater for flexible 3D objects and materials. ColorTable relies on color-coded blocks and tokens as input devices.
3. DESIGN AND DEVELOPMENT PROCESS
The following are the four major components that need to be designed and developed for any low-tech tangible 3D urban simulation table:
1. 3D scanning and 2D/3D geometry reconstruction
2. Physical 3D models
3. Digital simulation that takes 2D/3D geometry as input
4. Projection and digital data augmentation.
The key component that enables scanning and monitoring of physical objects and surfaces is Xbox Kinect, a popular and affordable vision sensor with built-in depth sensing camera. With Kinect, 3D objects can be detected and recognized, and gesture detection has never been easier to implement. Since its release at the end of 2010, Kinect has been utilized for various purposes such as for videoconference support (DeVincenzi et al. 2011), vision- based sensing in robotics (Krainin et al. 2011), and gesture- based interaction with objects in virtual environments (Santos et al. 2011). StereoBlocks demonstrated the use of Kinect to scan physical building blocks which are used to construct virtual 3D models that are projected side-by-side on the table next to the physical objects (Jota and Benko 2011). StereoBlocks is less intuitive than the method and demonstration presented in this paper, and not appropriate for the complexity of urban models as presented in this paper. For the tangible 3D wind tunnel simulation table, the following is the design and development process.
3.1. 3D scanning and geometry reconstruction
First, arbitrary foam models hand cut manually using hot wires were made. Microsoft Kinect was used to scan the 3D models. The objects were analysed using blob detection and depth analysis map to reconstruct digital 3D representation. In essence, any arbitrary models of any size and shape can be used for this purpose. Figure 2 (right) demonstrates an initial experiment using Kinect that correctly detects the objects on the table and draws bounding boxes around the objects.
3.2. Physical 3D urban models
For the installation of the tangible urban wind simulation, it is essential to demonstrate that the simulation can work on a high-density urban model and still produce a highly-responsive feedback. Therefore, an actual city model scaled to 1:500 (Figure 3) was modeled and fabricated using a 3D laser cutter. The material chosen for this purpose was MDF (Medium Density Fibre) boards, a type of wooden material. The lasercut MDF models were then painted in white to allow clear projection on it (Figure 4).
3.3. Digital Wind Simulation
The third component is the simulated wind flow based on the digital representation of the physical objects. To simulate the motion of air, the grid method of fluid dynamics was used based on the Navier-Stokes equations [7]. The space was divided into a two-dimensional grid and the fluid as air occupied its individual cells. The grid could be actually understood as two overlapping grids; one for storing the density of the air, density field, and second to store its velocity, vector field. Each point inside the grid had a velocity vector and a density value. The maximum density of the particles is set to the resolution of the screen. The calculation of the air flow is based on Jos Stam’s simplified Navier Stokes algorithm [7].
Since real time visualization demands fast computation, and thus degrades the precision of the analysis. This tangible tool did not employ a full-fledged computational fluid dynamics as such an analysis will require days to complete. Instead, a simplified version of the fluid analysis and visualization were implemented. The main purpose of the dynamic feedback is to give users intuitive performance feedback on their preliminary ideas of their design. In further research we will be evaluating the precision deviations, in this case by implementing the more advanced fluid dynamic methods. Therefore, even though our fluid dynamics simulation were able to operate in 3D, we used it only in 2D, as it would be necessary to sync multiple Kinect to determine the 3D shapes of the models of the buildings properly. Also, the 3D simulation would not be able to run in real time. Therefore, each building model was scanned and a 2D planar slice of the model was set as an input in the vector field of the fluid simulation. From each edge of the polygon a vector was calculated, which adjusted the vector field of the fluid dynamics. As a result, the particles representing the air flow move and change velocity according to this vector and density fields and also flow around the obstacles. The length and size of each particle is mapped to the velocity.
3.4. Projection and Digital Data Augmentation
The final step is to integrate all the three and calibrate the system. The table is 1m x 1m, placed in a 3m x 3 m dark curtained area. The augmentation of the digital urban simulation on the surface employs the use of an ordinary HD data projector. The Kinect and the projector needs to be calibrated to scan and project at the same area of the table. For the purpose of the exhibition, we found that the table had to be suspended at chest height to provide the best matching throw distance for the projector and the scanning area for the Kinect. Having the table at the chest height also allows very intimate interactions with the tangible objects and a more immersive experience for the users.
The two video processing streams (for Kinect and the projection), and the wind simulation runs on a standard Dell Desktop PC, with the embedded Intel HD integrated graphics, with no discrete graphic cards. The fluid simulation works on a low-density configuration of arbitrary 3D objects (Figure 5). It also works well for a complex and high-density urban model (Figure 6).

Figure 5. Wind simulation with low-density 3D objects
4. PRELIMINARY EVALUATION
The installation was one of the exhibits in a three-week public exhibition. The event draws attendance from architects, engineers, urban designers, urban planners, practitioners from the construction industry, students from various disciplines, and also general public. Attendees were invited to interact with the objects on the table, construct and deconstruct the city, perform form-finding exercises to discover different wind patterns and flows, as shown on Figure 1. The following are some of the responses that were recorded during the event: “Impressive”; “Extremely responsive”; an engineering professor said “I could use this to teach wind tunnel effects to my students”, a group of engineers said “this is a very intuitive tool, useful for early design”, a student said “now I know why that part of the road is very windy”.
5. CONCLUSION
This project explored the concept of interacting with a digital model through the use of tangible objects for rapid experimentation with forms and shape. It presents an affordable opportunity to create and participate in a tangible interaction platform for collaborative urban design. By creating an interface to the digital models integrated with an environmental simulation, a real-time feedback loop can be computationally augmented on the tangible physical representation. In the early stages of design, tangible interfaces can be used to mediate expert and non-expert users in a collaborative environment and as an input device to 3D CAD software for digital modeling and further analysis. This table is envisioned to influence the design and decision making process in architecture, engineering, and construction industry and urban and town planning exercises. Future works includes evaluating the table for usage in architecture and construction projects. Future versions of the table will have a series of “layers” which allows the users to view other types of analysis data. It will also employ a 3D fluid solver to improve the accuracy of the wind simulation. To do this, further research into the use of high performance computing is required.
Acknowledgements
The author would like to thank Jane Burry, Gerda Gemser, Sarah Pink, Kerry London, and Mark Burry for their support, RMIT Design Research Institute for the seed funding for the project, and Australian Research Council’s Linkage grant no LP120200305.
References
DEVINCENZI, A., YAO, L., ISHII, H., RASKAR, R. 2011. Kinected conference: augmenting video imaging with calibrated depth and audio. In Proc. CSCW ’11, ACM.
JOTA, R. AND BENKO, H. 2011. Constructing virtual 3D models with physical building blocks. In Proc. CHI EA’11, Extended Abstracts on Human factors in computing systems, ACM.
KRAININ, M., HENRY , P., REN, X., AND FOX, D. 2011. Manipulator and object tracking for in-hand 3D object modeling, The International Journal of Robotics Research, July 7.
MAQUIL V., PSIK T., WAGNER I. 2008. The ColorTable – A Design Story, In Proc. TEI 2008, Feb 18-21, Bonn, Germany.
SANTOS, E. S., LAMOUNIER, E. A., CARDOSO, A. 2011. Interaction in Augmented Reality Environments Using Kinect. In Proc. XIII Symposium on Virtual Reality (SVR ’11), IEEE Computer Society.
STAM, J. 2003. Real-Time Fluid Dynamics for Games. In Proc. the Game Developer Conference.
UNDERKOFFLER, J. AND ISHII, H.. 1999. Urp: A luminous-tangible workbench for urban planning and design. In Proc. CHI 1999, ACM, 386– 393.
WAGNER I., BASILE M., EHRENSTRASSER L., MAQUIL V., TERRIN J., WAGNER M. 2009. Supporting community engagement in the city: urban planning in the MR-tent, In Proc. of Communities and Technologies, June 25 – 27, University Park, PA, USA.